



Harmonic Drive Reducer Shaft Type model SHF-S-14 / SHF-S-17 / SHF-S -20 / SHF-S -25 / SHF-S-32. Tipe SHF-S adalah tipe poros dari seri gigi harmonik GIGAGER. Prinsip pengurangan gigi harmonik GIGAGER adalah menggunakan gerakan relatif Flexspline, Circular Spline, dan generator gelombang, terutama deformasi elastis yang dapat dikendalikan dari flexspline untuk mewujudkan gerakan dan transmisi daya.
1. Apa Fitur Produk dari GIGAGER Harmonic Drive?
• Kinerja biaya tinggi
• Efisiensi tinggi
• Serangan balik rendah
• Kekakuan tinggi
2. Drive Harmoni Seri SHF Shaft
Seri | Mengetik | Spec | Perbandingan gigi | |||||
SHF | S (Shaft) | 14 | 30 | 50 | 80 | 100 | - | - |
| 17 | 30 | 50 | 80 | 100 | - | - | ||
| 20 | 30 | 50 | 80 | 100 | 120 | - | ||
| 25 | 30 | 50 | 80 | 100 | 120 | 160 | ||
| 32 | 50 | 80 | 100 | 120 | - | - | ||
Untuk seri CSF, SHD, CSD lainnya, silakan lihat Katalog terlampir. (unduh PDF di halaman ini)
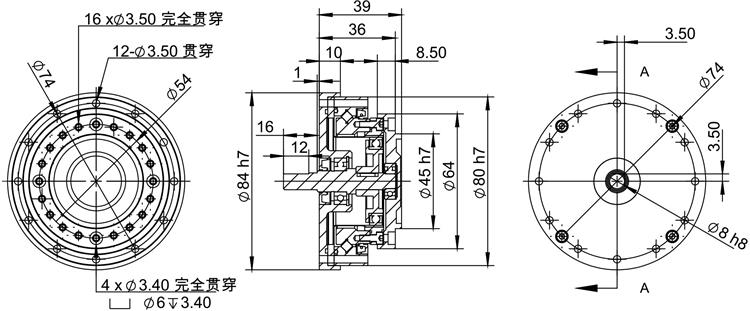
Model: SHF-S-14

Item | Perbandingan gigi | ||||
| 30rb | 50rb | 80rb | 100 rb | ||
Dinilai Torsi (Input 2000r / mnt) | Nm | 3.8 | 5.1 | 7.4 | 7.4 |
Torsi Maksimum yang Diizinkan (Mulai • Berhenti) | Nm | 8.6 | 17 | 22 | 27 |
Nilai Maksimum yang Diijinkan dari Torsi Beban Rata-Rata | Nm | 7.8 | 6.6 | 10.5 | 10.5 |
Torsi Maksimum Instan Diijinkan | Nm | 16 | 33 | 45 | 51 |
Kecepatan Putar Input Maksimum yang Diijinkan | r / mnt | 8000 | 8000 | 8000 | 8000 |
Input Rata-Rata Kecepatan Putar | r / mnt | 3500 | 3500 | 3500 | 3500 |
Reaksi | Arc dtk | ≦ 20 | ≦ 20 | ≦ 10 | ≦ 10 |
Umur yang dirancang | jam | 10000 | 10000 | 15000 | 15000 |
Model: SHF-S-17
Item | Perbandingan gigi | ||||
| 30rb | 50rb | 80rb | 100 rb | ||
Dinilai Torsi (Input 2000r / mnt) | Nm | 8.4 | 15.2 | 21 | 23 |
Torsi Maksimum yang Diizinkan (Mulai • Berhenti) | Nm | 15.2 | 32 | 41 | 52 |
Nilai Maksimum yang Diijinkan dari Torsi Beban Rata-Rata | Nm | 11.5 | 25 | 26 | 38 |
Torsi Maksimum Instan Diijinkan | Nm | 29 | 66 | 83 | 108 |
Kecepatan Putar Input Maksimum yang Diijinkan | r / mnt | 7000 | 7000 | 7000 | 7000 |
Input Rata-Rata Kecepatan Putar | r / mnt | 3500 | 3500 | 3500 | 3500 |
Reaksi | Arc dtk | ≦ 20 | ≦ 20 | ≦ 10 | ≦ 10 |
Umur yang dirancang | jam | 10000 | 10000 | 15000 | 10000 |
Model: SHF-S-20

Item | Perbandingan gigi | |||||
| 30rb | 50rb | 80rb | 100 rb | 120rb | ||
Dinilai Torsi (Input 2000r / mnt) | Nm | 14 | 24 | 32 | 38 | 38 |
Torsi Maksimum yang Diizinkan (Mulai • Berhenti) | Nm | 26 | 53 | 70 | 78 | 83 |
Nilai Maksimum yang Diijinkan dari Torsi Beban Rata-Rata | Nm | 19 | 32 | 45 | 47 | 47 |
Torsi Maksimum Instan Diijinkan | Nm | 48 | 93 | 121 | 140 | 140 |
Kecepatan Putar Input Maksimum yang Diijinkan | r / mnt | 6000 | 6000 | 6000 | 6000 | 6000 |
Input Rata-Rata Kecepatan Putar | r / mnt | 3500 | 3500 | 3500 | 3500 | 3500 |
Reaksi | Arc dtk | ≦ 20 | ≦ 20 | ≦ 10 | ≦ 10 | ≦ 10 |
Umur yang dirancang | jam | 10000 | 10000 | 15000 | 15000 | 15000 |
Model: SHF-S-25

Item | Perbandingan gigi | ||||||
| 30rb | 50rb | 80rb | 100 rb | 120rb | 160rb | ||
Dinilai Torsi (Input 2000r / mnt) | Nm | 26 | 37 | 60 | 64 | 64 | 64 |
Torsi Maksimum yang Diizinkan (Mulai • Berhenti) | Nm | 48 | 93 | 130 | 149 | 159 | 167 |
Nilai Maksimum yang Diijinkan dari Torsi Beban Rata-Rata | Nm | 36 | 52 | 83 | 103 | 103 | 103 |
Torsi Maksimum Instan Diijinkan | Nm | 90 | 177 | 242 | 270 | 289 | 298 |
Kecepatan Putar Input Maksimum yang Diijinkan | r / mnt | 5500 | 5500 | 5500 | 5500 | 5500 | 5500 |
Input Rata-Rata Kecepatan Putar | r / mnt | 3500 | 3500 | 3500 | 3500 | 3500 | 3500 |
Reaksi | Arc dtk | ≦ 20 | ≦ 20 | ≦ 10 | ≦ 10 | ≦ 10 | ≦ 10 |
Umur yang dirancang | jam | 10000 | 10000 | 15000 | 15000 | 15000 | 15000 |
Model: SHF-S-32

Item | Perbandingan gigi | ||||
| 50rb | 80rb | 100 rb | 120rb | ||
Dinilai Torsi (Input 2000r / mnt) | Nm | 72 | 112 | 130 | 130 |
Torsi Maksimum yang Diizinkan (Mulai • Berhenti) | Nm | 205 | 289 | 325 | 335 |
Nilai Maksimum yang Diijinkan dari Torsi Beban Rata-Rata | Nm | 103 | 159 | 208 | 205 |
Torsi Maksimum Instan Diijinkan | Nm | 363 | 540 | 635 | 652 |
Kecepatan Putar Input Maksimum yang Diijinkan | r / mnt | 4500 | 4500 | 4500 | 4500 |
Input Rata-Rata Kecepatan Putar | r / mnt | 3500 | 3500 | 3500 | 3500 |
Reaksi | Arc dtk | ≦ 20 | ≦ 10 | ≦ 10 | ≦ 10 |
Umur yang dirancang | jam | 10000 | 15000 | 15000 | 15000 |
3. Mengapa memilih GIGAGER?




4. Pengetahuan Terkait
Mekanik Drive Harmonik
Teori gearing gelombang regangan didasarkan pada dinamika elastis dan memanfaatkan fleksibilitas logam. Mekanisme ini memiliki tiga komponen dasar: generator gelombang (2 / hijau), spline fleksibel (3 / merah), dan spline melingkar (4 / biru). Versi yang lebih kompleks memiliki komponen keempat yang biasanya digunakan untuk mempersingkat panjang keseluruhan atau meningkatkan pengurangan gigi dalam diameter yang lebih kecil, tetapi tetap mengikuti prinsip dasar yang sama.
Generator gelombang terdiri dari dua bagian yang terpisah: cakram berbentuk bulat panjang yang disebut steker pembangkit gelombang dan bantalan bola luar. Steker roda gigi dimasukkan ke dalam bantalan, memberikan bentuk elips juga.
Spline fleksibel berbentuk seperti cangkir dangkal. Sisi spline sangat tipis, tetapi bagian bawahnya relatif kaku. Ini menghasilkan fleksibilitas yang signifikan dari dinding di ujung terbuka karena dinding tipis, dan di sisi yang tertutup cukup kaku dan dapat diamankan erat (ke poros, misalnya). Gigi diposisikan secara radial di sekitar bagian luar flex spline. Spline fleksibel pas erat pada generator gelombang, sehingga ketika steker generator gelombang diputar, spline fleksibel berubah bentuk menjadi elips yang berputar dan tidak tergelincir di atas cincin elips luar dari bantalan bola. Bantalan bola memungkinkan spline fleksibel berputar secara independen ke poros generator gelombang.
Spline melingkar adalah cincin melingkar kaku dengan gigi di bagian dalam. Flex spline dan generator gelombang ditempatkan di dalam spline melingkar, menyatukan gigi dari spline fleksibel dan spline sirkuler. Karena spline fleksibel dideformasi menjadi bentuk elips, giginya hanya benar-benar menyatu dengan gigi spline sirkuler di dua daerah di sisi berlawanan dari spline fleksibel (terletak pada sumbu utama elips).
Asumsikan bahwa generator gelombang adalah rotasi input. Saat steker generator gelombang berputar, gigi spline fleksibel yang menyatu dengan gigi sirkular perlahan-lahan berubah posisi. Sumbu utama elips flex spline berputar dengan generator gelombang, sehingga titik-titik di mana jala gigi berputar di sekitar titik pusat dengan kecepatan yang sama dengan poros generator gelombang. Kunci dari desain gear gelombang regangan adalah bahwa ada lebih sedikit gigi (sering misalnya dua lebih sedikit) pada spline fleksibel daripada yang ada pada spline lingkaran. Ini berarti bahwa untuk setiap putaran penuh generator gelombang, spline fleksibel akan diperlukan untuk memutar sedikit (dua gigi dalam contoh ini) ke belakang relatif terhadap spline melingkar. Jadi aksi rotasi generator gelombang menghasilkan rotasi spline flex yang jauh lebih lambat di arah yang berlawanan.
Untuk mekanisme gir gelombang regangan, rasio reduksi gir dapat dihitung dari jumlah gigi pada masing-masing gigi:

Misalnya, jika ada 202 gigi pada spline lingkaran dan 200 pada flex spline, rasio reduksi adalah (200 - 202) / 200 = −0,01
Dengan demikian flex spline berputar pada 1/100 kecepatan plug generator gelombang dan dalam arah yang berlawanan. Rasio reduksi yang berbeda ditetapkan dengan mengubah jumlah gigi. Ini bisa dicapai dengan mengubah diameter mekanisme atau dengan mengubah ukuran gigi individu dan dengan demikian mempertahankan ukuran dan beratnya. Rentang kemungkinan rasio roda gigi dibatasi oleh batas ukuran gigi untuk konfigurasi yang diberikan.
Tag populer: sendi robot drive harmonik, Cina, produsen, pemasok, pabrik, kualitas tinggi




